Читать книгу Inflection 05: Feedback - Jack Self - Страница 6
На сайте Литреса книга снята с продажи.
ОглавлениеNOTES ON POINT CLOUDS
Olivia Potter
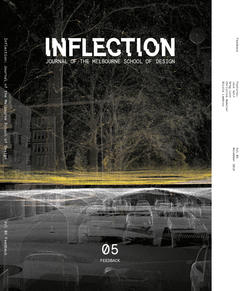
The cover image of Inflection vol. 5 is a point cloud representation of the South Lawn at the University of Melbourne Parkville campus, and was generated from a scan produced as part of Ben Waters’ Studio 19: IMG.ING (Semester 2, 2017). Gregg Franz from FARO conducted this scan using LIDAR technology.
The car park itself sits below a grassed and tree-lined lawn, used by university students and professors to relax and catch sunlight between classes. These two levels (the car park and the lawn) were scanned separately and—because the technology measures the relative distances of point coordinates—the two scans of South Lawn were able to be stitched together to create a single swarm of points.
Designed by the architectural firm Loader & Bayley and completed in November 1972, at its time of construction, South Lawn was the only fully enclosed car park in Australia. Marked at one entrance by an 18th century door from Dublin and at another by two statues of Atlas from the demolished Colonial Bank in Elizabeth Street, the otherwise almost hidden interior uses parabolic concrete profiles set on short columns to support the lawn above.1 The car park was used in George Miller’s film Mad Max (1979).
A LIDAR Scanner generates a point cloud by emitting rapidly pulsing (or continuous) laser beams towards objects. As it is doing this, the scanner also rotates around its vertical axis. Simultaneously, a mirror moves the scanner up and down. By turning on its horizontal axis, the scanner systematically runs a three dimensional sweep of its setting. When the laser beam detects it has hit a surface, energy is bounced back to the scanner and a timer records how long this has taken. From this information, a distance can then be calculated to record the location of a single point.2
This process is repeated thousands of times; points are recorded and fed back to the scanning technology to generate a cloud of relative positions in space. Each of these points is accompanied by an RGB reading, produced from a series of photographs taken by the device’s inbuilt camera. This technology creates a highly accurate, fast and detailed three dimensional image of the scanner’s visible physical environment. This data and accompanying process of generating digital feedback holds countless possibilities.
01Heritage Council Victoria, “Underground Car Park,” Victorian Heritage Database Report (Department of Environment, Land, Water and Planning, July 27, 2018), http://vhd.heritagecouncil.vic.gov.au/places/3808/download-report.
02Leica Geosystems AG, “Laser scanning: Chapter 2 of 3 - How It All Works,” (video) November 20, 2012, accessed July 27, 2018, https://www.youtube.com/watch?v=1lDO1UevAJI.
Studio IMG.ING, South Lawn car park, University of Melbourne, 2017. Point cloud scan by FARO. Image reproduced with author’s permission.